零次方科技近期震撼發(fā)布了其首款代號為Z1的人形機(jī)器人,標(biāo)志著該公司在機(jī)器人技術(shù)領(lǐng)域邁出了重要一步。這款機(jī)器人不僅能在復(fù)雜多變的地形中穩(wěn)定行走,還具備出色的抗干擾能力,即使面臨來自各個(gè)方向的強(qiáng)烈沖擊,也能保持屹立不倒。
在發(fā)布的視頻中,Z1展示了其驚人的學(xué)習(xí)能力。通過觀察人類的行為動(dòng)作,它能夠模仿并學(xué)習(xí)攻擊招式,利用全身協(xié)同控制能力進(jìn)行動(dòng)態(tài)防御。視頻中,兩臺(tái)Z1機(jī)器人上演了一場精彩絕倫的機(jī)器人格斗比賽,攻擊、躲避、平衡,每一個(gè)動(dòng)作都顯得那么流暢自然。
作為零次方科技的首款雙足人形機(jī)器人,Z1配備了最高可達(dá)150Nm的關(guān)節(jié)電機(jī),全身擁有27個(gè)自由度,載重測試極限高達(dá)20kg,負(fù)載與自重比超過70%。Z1還搭載了自研的EtherCAT通訊模組,實(shí)現(xiàn)了低延時(shí)高帶寬的整體系統(tǒng)性能。在設(shè)計(jì)之初,零次方團(tuán)隊(duì)就采用了AI技術(shù)輔助進(jìn)行機(jī)器人的結(jié)構(gòu)參數(shù)設(shè)計(jì),從而實(shí)現(xiàn)了更低的能耗和更高的動(dòng)態(tài)運(yùn)動(dòng)性能。結(jié)合自研的物理交互世界模型算法,Z1能夠應(yīng)對各種復(fù)雜工況和地形,展現(xiàn)出卓越的行走能力。
在視頻中,Z1還展示了與電影《鋼甲鐵拳》中相似的場景,完美復(fù)刻了人類的雙臂動(dòng)作,令人嘆為觀止。零次方團(tuán)隊(duì)表示,他們計(jì)劃在今年年底舉辦一場無機(jī)器人操作設(shè)備參與的人形機(jī)器人拳擊比賽,讓每個(gè)人都能感受到機(jī)甲的魅力。這項(xiàng)技術(shù)正是零次方團(tuán)隊(duì)在之前發(fā)布的雙臂機(jī)器人F1上所展示的,其核心算法之一便是基于人類視頻數(shù)據(jù)學(xué)習(xí)。
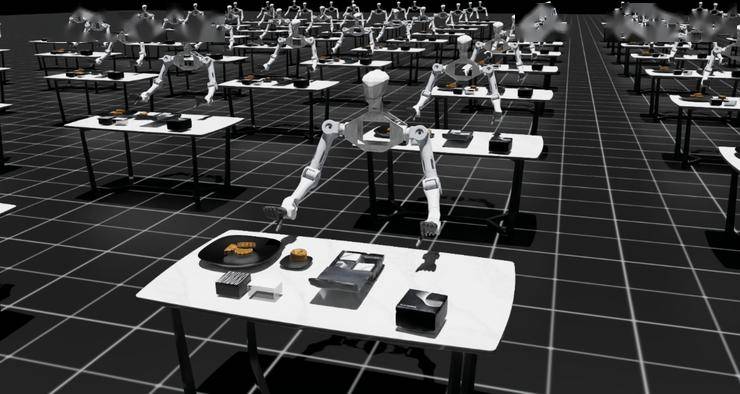
零次方團(tuán)隊(duì)認(rèn)為,數(shù)據(jù)量是實(shí)現(xiàn)通用具身操作的關(guān)鍵因素,而單位數(shù)據(jù)成本則是產(chǎn)品落地的基礎(chǔ)條件。他們借鑒了大語言模型和特斯拉自動(dòng)駕駛的Scaling Law,認(rèn)為實(shí)現(xiàn)具身智能的路徑無論是基于多模態(tài)大模型、構(gòu)建高維世界模型還是組合專有領(lǐng)域小模型,都離不開海量的優(yōu)質(zhì)數(shù)據(jù)。當(dāng)前,機(jī)器人所需的數(shù)據(jù)分為三層:真實(shí)的遙操數(shù)據(jù)、高質(zhì)量的仿真合成數(shù)據(jù)以及人類行為數(shù)據(jù)。其中,人類行為數(shù)據(jù)雖然質(zhì)量相對較低,但數(shù)量龐大,因此如何利用這些海量的人類視頻數(shù)據(jù)成為了零次方團(tuán)隊(duì)的主要研究方向。

零次方科技致力于通過三維人體運(yùn)動(dòng)姿態(tài)感知模型提取人類關(guān)鍵關(guān)節(jié)的運(yùn)動(dòng)數(shù)據(jù),并將其重映射到機(jī)器人身上。他們采用4D高斯濺射技術(shù)重建機(jī)器人所需觀測信息,最終利用Transformer-Based Diffusion Policy驅(qū)動(dòng)機(jī)器人自主完成任務(wù),使其具備直接向人類學(xué)習(xí)的能力。這種基于向人類學(xué)習(xí)的方式(LFWH)使得機(jī)器人能夠構(gòu)建基礎(chǔ)模型,并在仿真訓(xùn)練中進(jìn)行強(qiáng)化學(xué)習(xí),實(shí)現(xiàn)更加靈活泛化的操作。
零次方科技由清華大學(xué)和江淮前沿技術(shù)協(xié)同創(chuàng)新中心共同孵化,團(tuán)隊(duì)主創(chuàng)成員來自清華大學(xué)AI&Robot智能機(jī)器人實(shí)驗(yàn)室,在機(jī)器人操作及運(yùn)動(dòng)控制領(lǐng)域有著深厚的學(xué)術(shù)背景。團(tuán)隊(duì)成員還包括來自字節(jié)跳動(dòng)、百度等互聯(lián)網(wǎng)大廠以及協(xié)作機(jī)器人公司的專業(yè)人士,他們在將創(chuàng)新技術(shù)轉(zhuǎn)化為商業(yè)落地產(chǎn)品方面具有豐富的經(jīng)驗(yàn)。零次方團(tuán)隊(duì)成立于2024年5月,僅用短短4個(gè)月的時(shí)間就完成了兩款人形機(jī)器人產(chǎn)品的開發(fā),展現(xiàn)了其強(qiáng)大的創(chuàng)新能力和執(zhí)行力。

零次方科技的目標(biāo)是讓機(jī)器人能夠走進(jìn)千家萬戶,提高人們生產(chǎn)生活的效率。他們針對中小企業(yè)工廠改造難、手動(dòng)編程等問題,提出了用機(jī)器人自主學(xué)習(xí)實(shí)現(xiàn)原位替代的解決方案。通過完全仿人的設(shè)計(jì),機(jī)器人能夠替換對應(yīng)的功能,無需改變布局和編程,即可實(shí)現(xiàn)快速部署。這種持續(xù)學(xué)習(xí)的能力使得機(jī)器人在場景方面的泛化能力不斷增強(qiáng),為制造業(yè)產(chǎn)業(yè)升級和中小企業(yè)降本增效提供了有力支持。